BURST
BURST3 min read
Sols 4396-4397: Roving in a Martian Wonderland

Earth planning date: Monday, Dec. 16, 2024
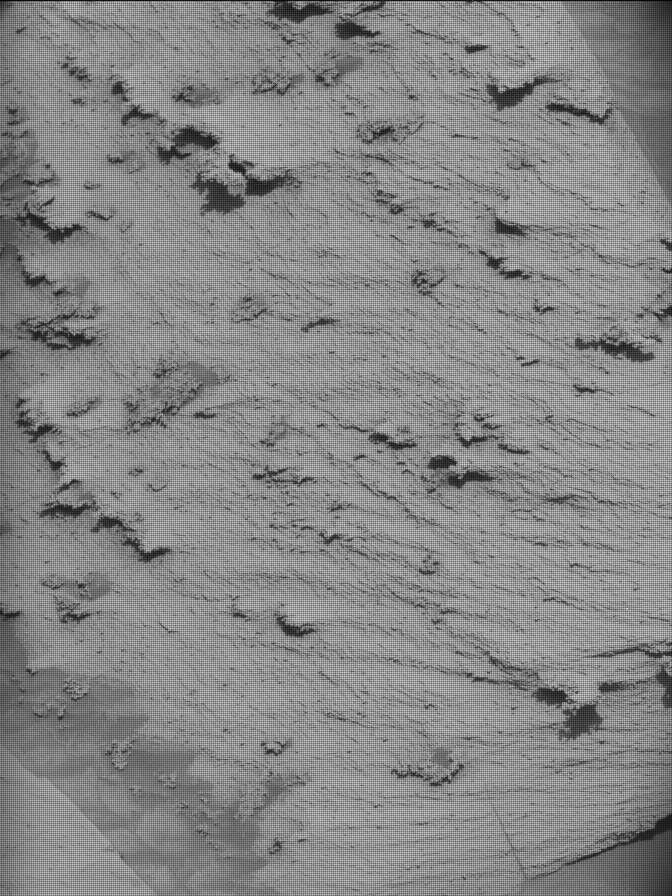
Over the weekend Curiosity continued her trek around the northern end of Texoli butte, taking in the beautiful views in all directions. Steep buttes reveal cross-sections through ancient sedimentary strata, while the blocks in our workspace contain nice layers and veins — a detailed record of past surface processes on Mars. Sometimes we get so used to our normal routine of rover operations that I almost forget how incredible it is to be exploring ancient sedimentary rocks on another planet and seeing new data every day. Curiosity certainly found a beautiful field site!
But the challenges are a good reminder of what it takes to safely explore Mars. We had hoped that the weekend drive could be extended a little bit using a guarded driving mode (using auto navigation), but the drive stopped early during the guarded portion. Because the drive stopped short, we did not have adequate imaging around all of the rover wheels to fully assess the terrain, which meant that unfortunately Curiosity did not pass the Slip Risk Assessment Process (SRAP) and we could not use the rover arm for contact science today. The team quickly pivoted to remote sensing, knowing there will be other chances to use the instruments on the arm in upcoming plans.
Today’s two-sol plan includes targeted science and a drive on the first sol, followed by untargeted remote sensing on the second sol. The Geology and Mineralogy Theme Group planned ChemCam LIBS and Mastcam on a target named “Avalon” to characterize a dark vein that crosscuts the bedrock in our workspace. Then Curiosity will acquire two long-distance RMI mosaics to document the first glimpse of distant boxwork structures, and a view of the top of Mount Sharp from this perspective. This Martian wonderland includes a lot of beautiful sedimentary structures and fractures, so the team planned Mastcam mosaics to assess a stratigraphic interval that may contain more climbing ripples, another mosaic to characterize the orientation of fractures, and a third mosaic to look at veins and sedimentary layers. Then Curiosity will drive about 50 meters (about 164 feet) to the southwest, and will take post-drive imaging to prepare for planning on Wednesday. The second sol is untargeted, so GEO added an autonomously selected ChemCam LIBS target. The plan includes standard DAN and REMS environmental monitoring activities, plus a dust-devil movie and Navcam line-of-sight observation to assess atmospheric dust.
I was on shift as Long-Term Planner today, so in addition to thinking about today’s plan, we’re already looking ahead at the activities that the rover will conduct over the December holidays. We’re gearing up to send Curiosity our Christmas wish list later this week, and feeling grateful for the gifts she has already sent us!
Written by Lauren Edgar, Planetary Geologist at USGS Astrogeology Science Center